

Først må du ta på en stor, upraktisk og værtett kjeledress. Så må du ta på vernebriller og tette sko. Dersom alarmen går, må du vite om du skal stå i ro eller evakuere. Over tid kan et slikt miljø, som finnes på Equinors testlaboratorium K-lab utenfor Haugesund, være potensielt helseskadelig for mennesker.
På K-Lab jobber Equinors robotikk-gruppe med både beltedrevne og firebeinte roboter som er sertifiserte for potensielt eksplosive miljøer. De ønsker å undersøke hvordan roboter kan bidra på inspeksjonsrunder der man sjekker ut ventiler, trykkmålere og lignende utstyr for å oppdage feil, slitasje eller lekkasjer på et tidlig tidspunkt.
Til tross for stor teknologisk utvikling innen robotikk, gjøres slike inspeksjonsrunder fremdeles av mennesker. Selv om teknologien er på plass for at robotene kan bygge seg et kart av omgivelsene, og finne veien rundt til dit de trenger å dra, mangler de en forståelse for den totale situasjonen på en arbeidsplass. Hvorfor er det så vanskelig å få en robot til å forstå sammenhenger, når det i teorien virker så lett?
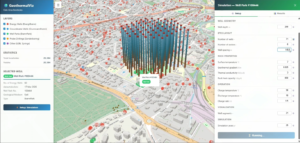
Dette er kjernen i kunnskapsprosjektet ROBPLAN som SINTEF leder, med NTNU, Equinor og det norske droneselskapet ScoutDI som partnere. I dag kan vi for eksempel gi en robotstøvsuger et kart over en leilighet, og den er programmert til å kjøre rundt hindringer og tilbake til sitt ladepunkt. Men, hva om det var tre eller fire roboter på samme gulv, med forskjellige oppgaver og verktøy og tillatelser? Det trenger du trolig ikke i ditt eget hjem, men på et stort gassraffineri er slike egenskaper nyttig.
I ROBPLAN får robotene en ny programvare med såkalt «automatisk resonnement» som gir dem et bilde av hva som skal skje fremover i tid. I eksperimentene på K-lab testes dette ved at de får en liste standardoppgaver, hvor målet er at de selv skal organisere seg for å utføre alle oppgavene og håndtere uventede hendelser underveis. Da støter de på mange utfordrende spørsmål:
- Hvilken robot skal utføre hvilke inspeksjoner, og i hvilken rekkefølge?
- Dersom en robot blir forsinket, kan andre roboter ta over noen av oppgavene?
- Hva skal roboten gjøre dersom inspeksjonen gir et uklart resultat? Bilder av trykkmålere og lignende kan leses av automatisk, men gir ikke alltid et sikkert svar. Bør den gå tilbake og ta et nytt bilde fra en annen vinkel?
- Hva skal roboten gjøre dersom den møter en hindring på veien til en inspeksjon? Er hindringen midlertidig, som et menneske som står i veien, eller mer permanent, som et stillas som er satt opp etter at kartet ble laget?
- Hva skal roboten gjøre dersom en alarm går av på anlegget?

Automatisk planlegging for roboter er et godt etablert fagfelt i akademia, men å bruke disse modellene i praksis er ikke alltid lett. Robotene må vite at det finnes ulike handlinger, som har en betingelse og en effekt. Dersom oppgaven er å ta bilde av en ventil, er det en forutsetning at roboten står i riktig posisjon for å ta bildet og at den har nok batteri. Dersom en batterilader er opptatt av en annen robot, er det en forutsetning at roboten selv forstår at den må oppsøke en annen lader for å få batteri.
Dette høres kanskje enkelt ut i teorien, men i praksis er automatisk resonnement noe som den nye bølgen av kunstig intelligens ikke har revolusjonert ennå. Det skyldes i hovedsak to hindringer:
1. Feilmargin. En realistisk arbeidsplan må henge sammen på en logisk måte, og enten holder dette argumentet vann eller ikke. Der ChatGPT kan si at bildet av tvillingsøsteren din «nesten» er deg, vil en slik type svakhet kunne utgjøre en fare når roboter skal gjennomføre oppgaver på steder som oljeplattformer, gassanlegg og fabrikker. Det finnes ikke noe «nesten» riktig.
2. Etterprøvbarhet. Innenfor automatisk resonnement er det avgjørende å forstå hva som har gått feil. Dersom ChatGPT foreslår at prins William er statsminister i Storbritannia, får man ikke mulighet til å ettergå informasjonen. Dermed vet man ikke hvilken nettside som er kilden til feilinformasjon eller hva som er den logiske bristen i resonnementet.
Det langsiktige målet for ROBPLAN og Equinors robotikk-gruppe, er å få roboter til å gjøre rutinemessige oppgaver helt på egen hånd. Lykkes prosjektet med dette, kan operatøren fokusere på mer overordnete oppgaver, som å holde anlegget i god drift og å redusere risiko for mennesker.
Gode planleggingssystemer for roboter kan, på lang sikt, integreres med digitalisering og planleggingsarbeid for arbeidsplassen som helhet, slik at oppgaver fordeles mellom mennesker og roboter.









Kommentarer
Ingen kommentarer enda. Vær den første til å kommentere!