


Vindparker er i økende utvikling over hele verden. Flere vindparker fører også til mer oppmerksomhet for å forstå og begrense de mulige negative påvirkningene de har på fuglelivet. Slike påvirkninger kan for eksempel være tap av habitat eller dødsfall som følge av kollisjoner med vindturbiner.
Kollisjoner med vindturbiner
Det er mulig å redusere antall fugle-kollisjoner med vindturbiner ved å unngå høyrisikoområder når man planlegger nye vindparker, i tillegg til å ta i bruk enkelte tiltak under drift. I denne artikkelen introduserer vi et nytt konsept som forhindrer fuglekollisjoner med roterende blader av vindturbiner ved hjelp av reguleringsteknikk.
Den grunnleggende ideen bak dette kom allerede i 2015, men vindindustrien har nå fattet sterk interesse for dette. Bærekraftig vindutvikling er en viktig aktivitet ved forskningssenteret vårt NorthWind, og vi søker å modne denne teknologien videre slik at den kan settes i praktisk bruk i vindparker, både til havs og på land.
Hvorfor kolliderer fugler med roterende blader på vindturbiner?
Før vi foreslår noen nye løsninger for å forhindre kollisjoner, er det viktig å forstå hvorfor noen fuglearter kolliderer med vindturbinblader. Én årsak kan være at de ikke oppfatter de roterende bladene noen få meter foran dem. Derfor gjenkjenner de dem ikke som objekter som bør unngås.
Når fuglen nærmer seg vindturbinen, endres bildet av roterende blader for raskt til å bli behandlet av øynene deres og vises som en gjennomsiktig uklarhet. Dette kalles bevegelsesuskarphet, en visuell effekt som oppstår med raske bevegelige objekter. Et eksempel på en slik effekt kan observeres når kolibrier flyr, og vingene deres er nesten usynlige for menneskelige øyne. I tillegg har noen fuglearter en tendens til å se sidelengs og nedover mens de flyr (for å søke etter mat eller partnere, for eksempel), noe som kan være mer relevant for dem enn å se fremover i åpent luftrom. Når de gjør det, kan de ikke se noen objekter som er plassert i flyretningen deres, og de blir mer utsatt for kollisjoner.
Et nytt patentert kontrollkonsept for å forhindre kollisjoner
Det patenterte konseptet heter SKARV, det samme som navnet på en fugleart og et akronym for «Slippe fugleKollisjoner med Aktiv Regulering av Vindturbiner». SKARV består av et nytt aktivt kontrollsystem som gjør små justeringer av rotorhastigheten til vindturbiner etter å ha oppdaget fugler innenfor en viss avstand fra bladene.
Hovedmålet med dette kontrollsystemet er å redusere kollisjoner mellom fugler og roterende vinger på vindturbiner uten å:
- Forstyrre driften av vindkraftverket, det vil si unngå at turbinene stenges ned og følgelig tap av strømproduksjon.
- Forstyrre annet omkringliggende dyreliv og nærliggende beboere, noe som kan skje når advarselslyder eller lys aktiveres for å avverge at fugler nærmer seg turbinbladene.

Hvordan fungerer det?
Konseptet er basert på at det oppdager fugler med sensorer, som for eksempel kameraer, og gjør et estimat for hva som vil være fuglens sannsynlige flyrute. Deretter endres den roterende hastigheten til vindturbinen bittelitt for å minimere sannsynligheten for kollisjon.
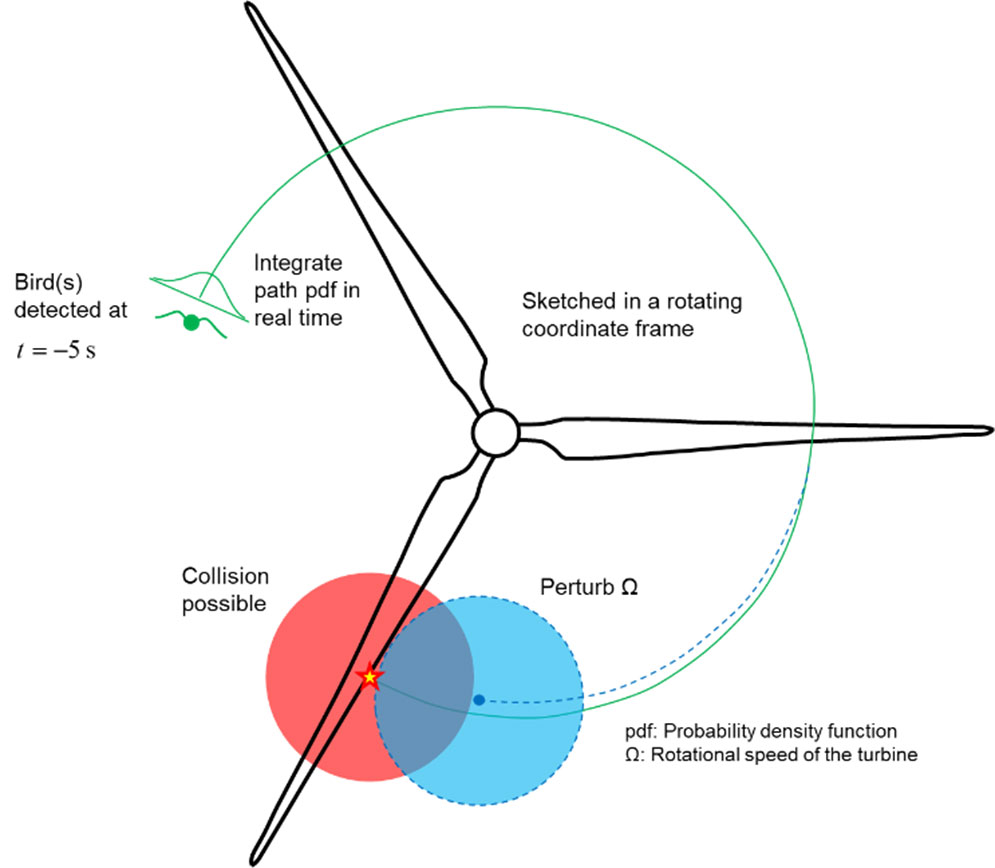
Illustrasjon av konseptet bak SKARV: De fargede områdene indikerer hvor fuglen med stor sannsynlighet vil være når den krysser rotorens plan. En mulig kollisjon (rød sirkel) unngås ved å redusere turbinens hastighet, og fuglen krysser rotorens plan mellom bladene (blå sirkel).
Når bladene er ideelt justert med hensyn til den mest sannsynlige fluktbanen, er det stor sannsynlighet for å unngå kollisjon på grunn av klaringen mellom bladene og fuglen når den passerer gjennom rotoren. Siden hastigheten kun justeres litt, enten opp eller ned, gir ikke dette noe betydelig tap av kraftproduksjon.
Tilfeller der det er vanskelig å estimere en flyvbane med rimelig sikkerhet kan for eksempel være i når det er snakk om flaggermus eller fugler med høyst uregelmessige fluktbaner, eller når en flokk med fugler nærmer seg. I disse tilfellene kan turbinene enkelt stoppes i en kort periode. I normale tilfeller vil imidlertid en liten justering av hastigheten være tilstrekkelig for å unngå kollisjon samtidig som man unngår tap av produksjon.
Vindturbiner opererer typisk med en variabel og kontrollerbar rotasjonshastighet for å maksimere kraften som trekkes ut av vinden. SKARVs konsept kan brukes i en vindpark med slike turbiner. Vindturbinene vil da få installert et fuglesporingssystem og en dedikert programvare som estimerer både fuglens fluktbane og ønsket justering i rotorens hastighet for å minimere risikoen for kollisjon. Det er mulig å inkludere hastighetsjusteringene i et standard kontrollsystem for vindturbiner.
Veien videre
Vi har så langt brukt datasimuleringer for å verifisere at SKARV-konseptet kan fungere. Simuleringen viser teoretisk hvordan systemet fungerer, og resultatene indikerer at fuglene bør spores innenfor en rekkevidde på 100 – 200 meter fra turbinen. Simuleringen viser også at konseptet er effektivt hvis fuglenes bevegelser kan forutsies minst 5 sekunder i forveien. Jo tidligere man kan forutsi dette, desto mindre moment er nødvendig for å justere rotasjonshastigheten på turbinen.
Vi ønsker nå å videreutvikle teknologien slik at den kan settes ut i live i vindkraftverk, både på land og til havs. Det første målet er å utvikle en sanntidskontrollalgoritme og deretter gjøre testing og demonstrasjon i felt. Hvis dette er vellykket, kan SKARV-teknologien være tilgjengelig for kommersiell bruk og implementeres i vindkraftverk om ca. 5 år. Det kan muligens gjøres raskere avhengig av industriens interesse. Når SKARV-teknologien er fullt utviklet, kan den innlemmes i både eksisterende og nye vindkraftverk, på land og til havs. Teknologien vil være et viktig tiltak for å unngå kollisjoner med fugler og gjøre vindkraft mer bærekraftig.







Kommentarer
Ingen kommentarer enda. Vær den første til å kommentere!